Nous avons été assez rapidement confrontés au problème de la
visualisation des actions de nos agents: dans un milieu dynamique où
les conditions de jeu sont rapidement changeantes, il est nécessaire à
l'expérimentateur de posséder une bonne idée des buts de ses agents et
des paramètres mis en ![]() uvre dans les actions entreprises
(notamment, les paramètres physiques de localisation). Typiquement,
il est nécessaire de connaître le chemin qu'un agent désire emprunter
pour se rendre à un point donné et la représentation textuelle seule
est insuffisante pour ce type d'informations. Dans un univers discrétisé, la
visualisation de telles informations est relativement aisée. Mais dans
un environnement non discrétisé comme c'est le cas pour la simulation
de la RoboCup, il est nécessaire d'opter pour une visualisation
imparfaite (complétée au besoin par des informations textuelles) et
spécifique ou alors de développer un mécanisme de visualisation
vectorielle et symbolique (le symbolisme est notamment nécessaire pour
garantir la généricité de la visualisation et le maintien d'une
information dynamique). Nous avons opté pour l'implémentation d'un mécanisme de
définition, de maintenance et d'affichage d'objets vectoriels, qui
peuvent être initialisés et utilisés par l'un ou l'autre des
composants de notre agent.
uvre dans les actions entreprises
(notamment, les paramètres physiques de localisation). Typiquement,
il est nécessaire de connaître le chemin qu'un agent désire emprunter
pour se rendre à un point donné et la représentation textuelle seule
est insuffisante pour ce type d'informations. Dans un univers discrétisé, la
visualisation de telles informations est relativement aisée. Mais dans
un environnement non discrétisé comme c'est le cas pour la simulation
de la RoboCup, il est nécessaire d'opter pour une visualisation
imparfaite (complétée au besoin par des informations textuelles) et
spécifique ou alors de développer un mécanisme de visualisation
vectorielle et symbolique (le symbolisme est notamment nécessaire pour
garantir la généricité de la visualisation et le maintien d'une
information dynamique). Nous avons opté pour l'implémentation d'un mécanisme de
définition, de maintenance et d'affichage d'objets vectoriels, qui
peuvent être initialisés et utilisés par l'un ou l'autre des
composants de notre agent.
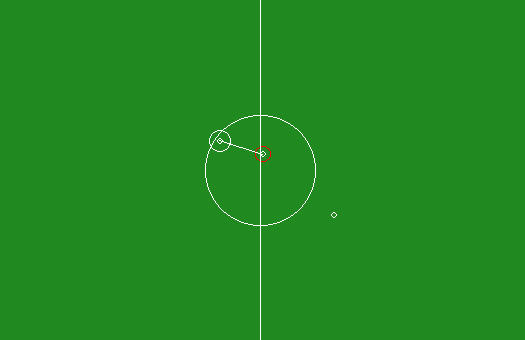
En raison de l'aspect dynamique et mobile des symboles à visualiser
(joueur, balle, chemins, vecteurs, angle de vision, etc.), nous avons
mis en place deux systèmes de coordonnées, le premier étant cartésien
et absolu (l'origine étant le centre du terrain) et le deuxième étant
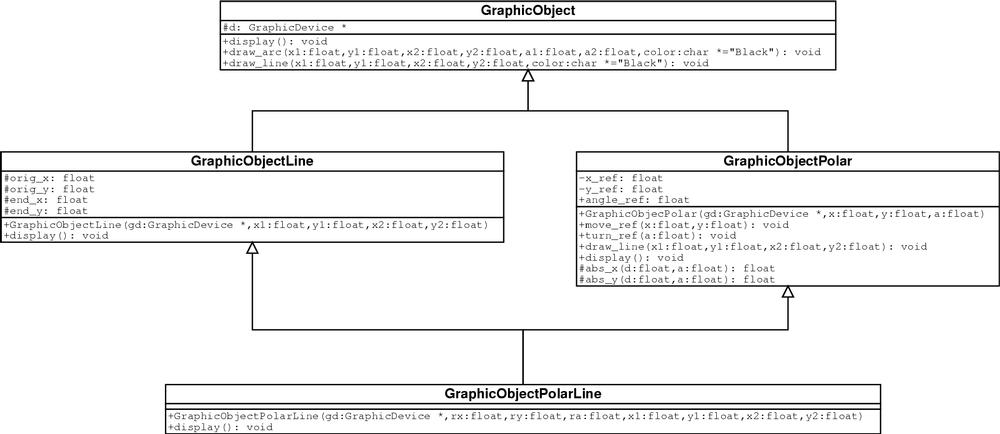
polaire et relatif à une origine. Un objet graphique utilisant des
coordonnées polaires doit hériter de la classe PolarObject,
qui possède toutes les méthodes nécessaires à la maintenance d'une
origine et à la transformation des coordonnées relatives polaires
en coordonnées absolues cartésiennes.
Nous avons souhaité introduire une fonctionnalité supplémentaire à
notre implémentation de la visualisation graphique: celle de
l'indépendance du médium. Les mécanismes de
visualisation se limitent souvent à un seul paradigme de représentation (écran
d'ordinateur ou image bitmap, affichage vectoriel PostScript,
sortie brute des coordonnées dans un fichier texte, etc.). Nous
considérons ce mécanisme comme limitatif, notamment car la
transformation d'un paradigme à l'autre est souvent destructive ou
approximative. Ainsi, nous avons développé un mécanisme d'abstraction
du support d'affichage nous permettant:
Nous avons déjà implémenté un périphérique d'affichage basé sur les primitives graphiques de la bibliothèque Xlib, qui permet de visualiser les objets graphiques dans une fenêtre X11. Nous envisageons le développement d'un périphérique PostScript (dont l'utilité prend tout son sens dans la production de documents écrits), d'un périphérique MPEG (par exemple en utilisant la bibliothèque libfame, disponible sur le web à l'URL http: //fame.sourceforge.net/libfame/overview/), afin de produire de manière native des séquences animées (fichiers vidéo) et d'un périphérique OpenGL, permettant une visualisation en trois dimensions.